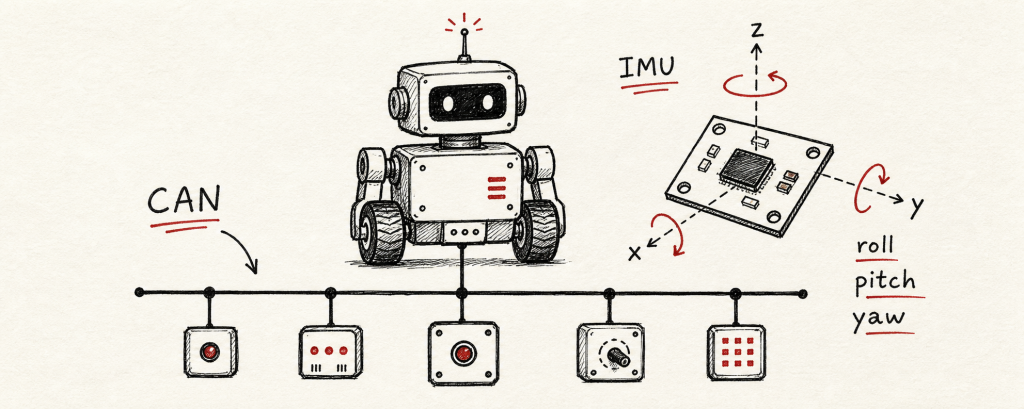
针对ROS 2生态中标准工具robot_localization配置复杂、易发散的痛点,开发者推出了全新的传感器融合算法FusionCore。这是一个基于22状态无色卡尔曼滤波(UKF)的系统,直接在地心地固坐标系(ECEF)下融合IMU、轮式编码器和GPS数据,省去了繁琐的坐标投影转换。FusionCore具备IMU偏差估计、自适应噪声协方差调整及卡方检验异常值剔除功能。在NCLT真实数据集的基准测试中,FusionCore在6个测试序列中的5个性能优于标准EKF,且在标准库发散至NaN的情况下保持了极高的稳定性,为移动机器人定位提供了新的高鲁棒性选择。
原文链接:Hacker News




评论前必须登录!
立即登录 注册